
论文解读:Attend Before Attention: Efficient and Scalable Video Understanding via Autoregressive Gazing
论文解读:Attend Before Attention: Efficient and Scalable Video Understanding via Autoregressive Gazing
作者:Baifeng Shi, Stephanie Fu, Long Lian, Hanrong Ye, David Eigen, Aaron Reite, Boyi Li, Jan Kautz, Song Han, David M. Chan, Pavlo Molchanov, Trevor Darrell, Hongxu Yin 机构:UC Berkeley, MIT, Clarifai, NVIDIA arXiv:2603.12254 | 日期:2026年3月12日
TLDR
提出AutoGaze,一个仅3M参数的轻量级模块,在ViT处理之前自回归地选择多尺度patch以去除视频冗余。视觉token减少4×-100×,ViT加速最高19×,MLLM加速最高10×,实现1K帧4K分辨率视频理解,VideoMME达67.0%。同时提出首个高分辨率长视频QA基准HLVid(5分钟4K视频),AutoGaze比基线提升10.1%,比之前最佳MLLM高4.5%。
动机与发现
问题:如何高效处理长视频和高分辨率视频
现有MLLM对视频每一帧的每个像素都同等处理,但视频存在大量时空冗余(静态背景、重复区域)。现有token压缩方法通常只在LLM层面裁剪token,ViT仍需处理全部像素,形成效率瓶颈。
关键发现
- 运动是主要信息源:AutoGaze优先选择光流大的运动区域patch
- 尺度与细节匹配:细节丰富区域使用更细粒度尺度,平坦区域用粗粒度尺度
- OOD泛化能力强:在未见过的视频风格和语义上仍能正确追踪变化区域
- 高FPS/高分辨率更高效:30FPS 4K视频仅需约1%的patch即可达到0.7重建损失
方法
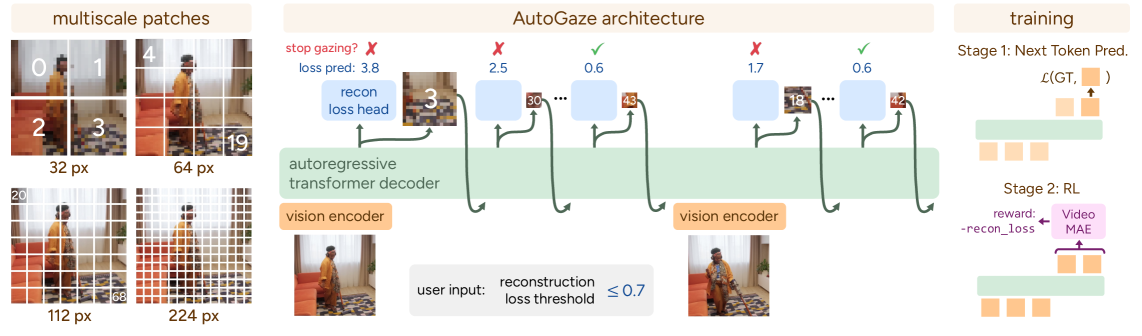 图2: AutoGaze架构与训练流程。左中:自回归地解码多尺度patch索引;右:两阶段训练:NTP预训练 + RL后训练
图2: AutoGaze架构与训练流程。左中:自回归地解码多尺度patch索引;右:两阶段训练:NTP预训练 + RL后训练
核心思想
AutoGaze是一个3M参数的轻量模型,包含卷积编码器和自回归transformer解码器。它逐帧处理视频,自回归地选择最小的多尺度patch集合,使重建损失低于用户指定阈值。
自回归注视机制
AutoGaze交替进行帧编码和patch选择。对第一帧编码后解码patch索引,第二帧基于两帧特征和第一帧的注视历史来解码patch索引,从而避免选择冗余patch。解码过程类似LLM,但词汇表是patch索引{1,…,V}而非词语。
自动决定注视长度
解码器增加一个预测头,在每步解码时预测当前已选patch的重建损失。一旦预测损失低于阈值,自动停止对该帧的注视。
多尺度注视
词汇表包含多尺度patch(如1×1、2×2、4×4、8×8),解码器可根据区域细节程度选择不同尺度。平坦区域用粗粒度patch覆盖大面积,细节区域用细粒度patch捕获精细信息。
关键创新点:
- 在ViT之前去除冗余patch(而非ViT之后),从源头减少计算
- 多尺度patch选择,适配不同细节程度区域
- 多token预测,一次输出多个patch索引,加速解码
两阶段训练
NTP预训练:在800K视频中用贪心搜索收集250K视频的准最优注视序列,用next-token prediction损失训练模型学习子最优注视策略。
RL后训练:用简化GRPO算法,以重建损失为奖励,发现更优的注视序列。奖励为未来帧负重建损失的折扣累积。
下游应用
尽管训练在16帧224×224视频上,AutoGaze可处理任意分辨率和时长视频。将视频分割为16×224×224时空tile,在每个tile上运行AutoGaze后合并结果。ViT通过插值支持多尺度patch输入,将图像ViT改造为视频ViT。
实验设定与结果
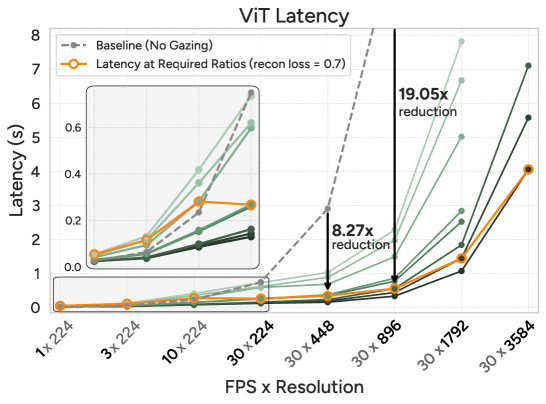 图7: AutoGaze在ViT和MLLM上的效率增益。使用重建损失0.7所需的注视比例时,ViT加速最高19×,MLLM加速最高10×
图7: AutoGaze在ViT和MLLM上的效率增益。使用重建损失0.7所需的注视比例时,ViT加速最高19×,MLLM加速最高10×
实验配置
- ViT:SigLIP2-SO400M
- MLLM:NVILA-8B-Video
- 重建损失阈值:0.7(性能下降<0.5%)
- 数据集:VideoMME, MVBench, NExT-QA, L-VidBench, EgoSchema, MLVU, HLVid
核心结果
效率提升:
- 视觉token减少4×-100×(30FPS 4K视频仅需~1% patch)
- ViT加速最高19×,MLLM加速最高10×
- 可扩展至1024帧、3584分辨率
性能对比:
| 模型 | VideoMME | MVBench | HLVid |
|---|---|---|---|
| NVILA-8B-Video | 64.2 | 68.1 | 42.5 |
| NVILA + AutoGaze | 67.0 | 69.7 | 52.6 |
| Qwen2.5-VL-7B | 65.1 | 69.6 | 48.1 |
| GPT-4o | 71.9 | 64.6 | 49.3 |
AutoGaze在HLVid上比基线提升10.1%,比之前最佳模型VideoChat-Flash高4.5%。
与token裁剪方法对比: AutoGaze将ViT延迟从2.20s降至0.55s(4×加速),而其他方法仅加速LLM,ViT延迟不变。性能与无裁剪基线持平。
启示和结论
主要贡献
- 提出AutoGaze,在ViT之前去除视频冗余patch,从源头提升效率
- 两阶段训练(NTP预训练+RL后训练)学习高效注视策略
- 首个高分辨率长视频基准HLVid,推动该方向研究
理论意义
- 证明视频理解无需处理全部像素,选择性注视可达同等甚至更好效果
- 将LLM的自回归思想应用于视觉token选择
实践价值
- 使4K长视频理解成为可能,无需巨额算力
- 轻量级(3M参数)可无缝集成到现有ViT和MLLM中
局限性
- 训练数据以16帧224×224为主,对极端长视频或超高清视频的泛化有待验证
- 重建损失阈值需人工设定,不同场景可能需调整
代码:https://autogaze.github.io/